Les capteurs
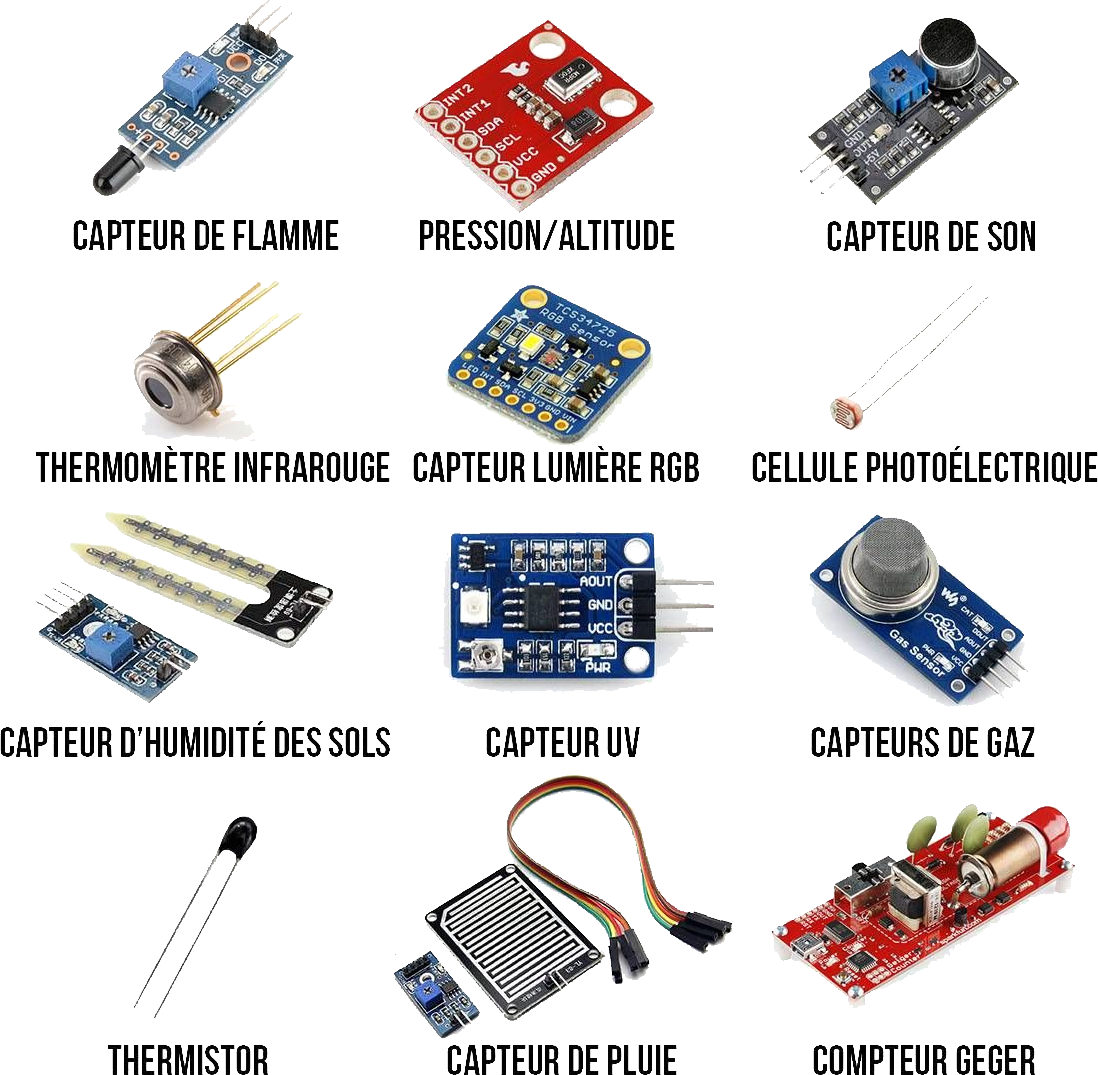
Pour que le système puisse recevoir des informations de son environnement, des capteurs sont nécessaires pour les traduire en signaux électriques interprétables par la commande.
Note : Le microcontrôleur lui-même peut être doté de capteurs en interne (Température, GPS, ...)

1. Capteurs simples à 3 broches
- Une broche GND Pour mettre à la masse 0V commune à tout le système
- Une broche VCC Pour alimenter le capteur et donner un signal max à VCC
- Une broche Out Tension entre 0V et VCC proportionnelle au signal mesuré
2. Capteurs
Pour réaliser des tâches, le système reçoit des informations venant de l'extérieur qui sont transformées en un signal électrique lisible par la commande. Ces informations viennent de capteurs ou éventuellement d'un écran tactile.
3. Actionneurs
Les tâches exécutées sont réalisées par des actionneurs pilotés par un signal électrique venant de la commande. Cette action peut être un simple affichage.
4. Communication
Pour que ces 3 premiers types d'éléments puissent échanger des signaux de façon coordonnée et compréhensible, une communication est obligatoire.
Un seul fil peut suffire si les informations sont simples et peu nombreuses. Un protocole complexe peut être nécessaire pour des informations complexes et nombreuses. Entre les deux, tous les cas sont possibles.
5. Afficheurs
L'affichage sert le plus souvent à informer l'utilisateur de la situation dans laquelle se trouve le système. Il n'est pas obligatoire. Comme il est piloté par la commande il est souvent classé comme Actionneur. Mais avec l'arrivée des écrans tactiles, il apparait aussi comme capteur. On a en fait donc ici une catégorie à part entière.
Microcontrôleur vs Microprocesseur
| Fonctionnement généralement autonome | généralement interactif avec l'utilisateur |
| Microcontrôleur (MCU) | Microprocesseur (MPU) |
|---|---|
| Communication avec l'extérieur seulement par des ports. | Communication avec l'extérieur par des périphériques pour l'interactivité. |
| Architecture Harvard : Programmes et données séparées. | Architecture Von Neumann : Programmes et données dans le même espace. |
| Jeu d'instructions réduit : RISC (Reduced Instructions Set Construction). | Jeu d'instructions étendu : CISC (Complex Instructions Set Construction). |
| Instructions basiques mais rapide et sur 1 cycle d'horloge en général. | Instructions sophistiquées mais sur plusieurs cycles d'horloge en général. |
| Beaucoup de registres différents : Programmation plus claire. | Relativement peu de registres : La plupart des opérations se font sur des plages mémoire qui peuvent être immenses. |
| Capacité mémoire limitée mais interne à la puce. | Capacité mémoire quasi illimitée mais externe à la puce. |
| Fonctionnement mono-tâche. | Fonctionnement multi-tâches. |
| Coût très faible de la puce et de son environnement. | Coût élevé de la puce et de son environnement (ordinateur). |
| Taille très réduite de la puce et de sa carte support. | Taille importante de la puce et surtout de sa carte mère. |
| Démarrage quasi instantané. | Démarrage lent et complexe. |
| Consommation électrique faible. | Consommation électrique importante de la puce et de son environnement. |
| Possède des modes d'économie d'énergie très efficaces. | Mode veille moins efficace et n'affectant pas tout l'environnement. |
| Une seule couche logicielle : Programmation technique systématique. | Nombreuses couches logicielles : La programmation elle-même est en général évitée. |